

Modern battlefields and contested airspace have one thing in common: GNSS is no longer reliable. True North, the autonomous navigation module developed by Skyline Drones, was built for exactly this reality and for GNSS-Independent Navigation enviroments.
The Problem Nobody Talks About: GNSS Is a Single Point of Failure
Unmanned aerial vehicles have transformed reconnaissance, logistics, precision strike, and infrastructure inspection. Yet nearly every commercial and military drone in operation today shares the same critical vulnerability: total dependence on GNSS.
Global Navigation Satellite Systems (GNSS) were not designed with adversarial conditions in mind. A signal traveling over 20,000 kilometers from orbit to a drone antenna can be disrupted in milliseconds by a low-cost jammer. It can be spoofed, fed false coordinates, by equipment available for a few hundred dollars on the open market. And in dense urban environments, underground corridors, or mountainous terrain, it simply disappears.
The consequences are not theoretical. GPS jamming and spoofing incidents have been documented across conflict zones in Eastern Europe, the Middle East, and the South China Sea. Commercial drones have been redirected mid-flight. Military UAVs have been forced to abort missions. The vulnerability is structural, and patching it at the signal level is increasingly futile.
The question is not whether GNSS will fail. The question is what happens to your drone when it does.

What Happens When GNSS Goes Dark
When a standard drone loses its GNSS fix, the results range from mission abort to complete loss of vehicle. Most flight controllers enter failsafe modes, hovering in place, returning to launch, or simply descending. In a contested environment, any of these outcomes is unacceptable.
The root cause is architectural: conventional autonomous navigation is built on the assumption that satellite positioning is always available. Remove that assumption, and the entire navigation stack collapses.
This is the challenge that True North was designed to solve.
Introducing True North: Autonomous Navigation Without Signals
TrueNorth is a GNSS-independent autonomous navigation module developed by Skyline Drones for FPV and UAV platforms. It delivers fully self-contained positioning and navigation in environments where GNSS is unavailable, actively jammed, or spoofed, with no reliance on external signals, ground-based infrastructure, or cloud connectivity.
The module operates through the fusion of two complementary technologies: Visual-Inertial Odometry (VIO) and Visual Place Recognition (VPR), combined through a probabilistic sensor fusion pipeline running entirely onboard.
How True North Works
Layer 1 — Visual-Inertial Odometry (VIO)
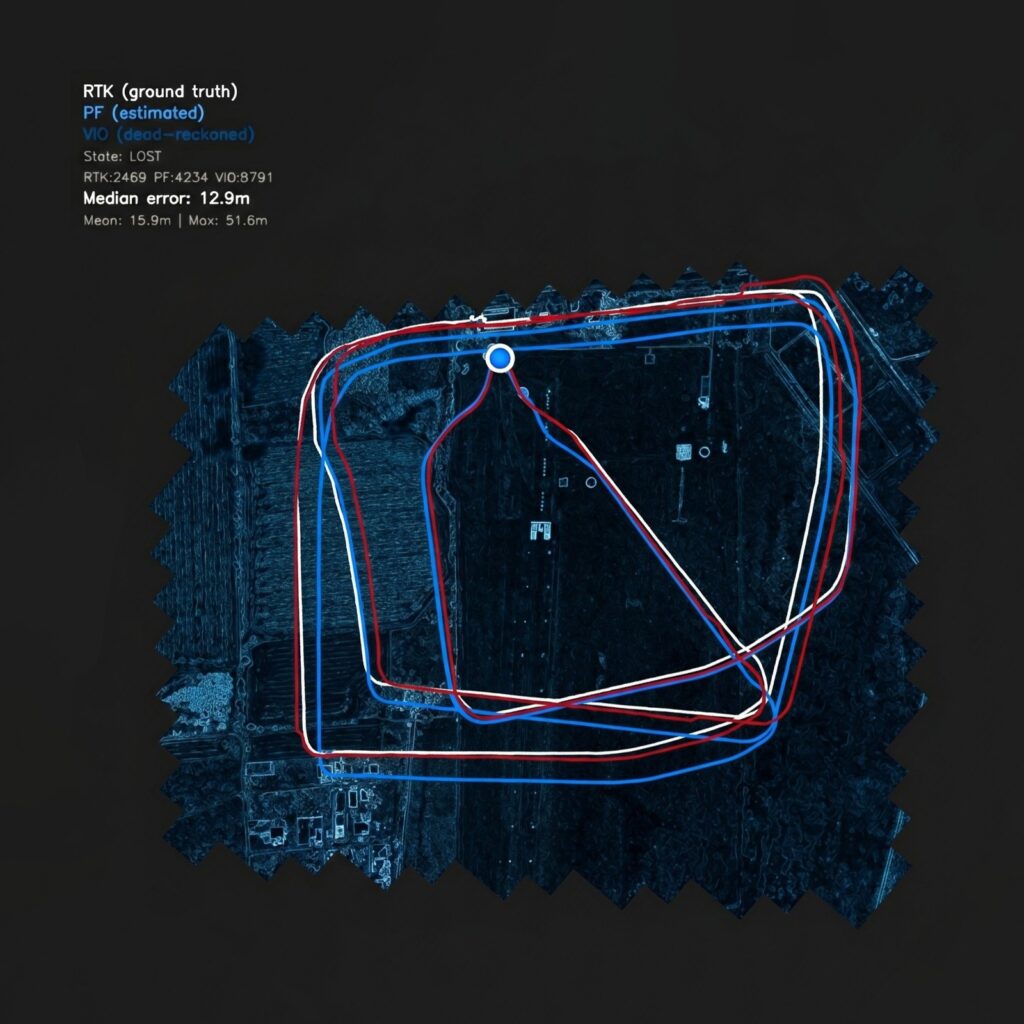
The drone always knows its position, velocity, and orientation in three-dimensional space, regardless of external signal availability. Accumulated drift is detected and corrected periodically through absolute position fixes provided by the VPR layer.
Layer 2 — Visual Place Recognition (VPR)
VIO alone is powerful, but it drifts over time. True North solves this with a deep-learning-based VPR subsystem that continuously anchors the drone’s estimated position to real-world coordinates.
At runtime, keypoints extracted from the drone’s downward-facing camera are matched against a preloaded georeferenced orthophotomap dataset stored locally on the compute unit. Successful matches yield absolute global position estimates that eliminate long-range drift accumulation.
The maps are compatible with commercial satellite imagery, aerial survey outputs, and mission-specific datasets prepared before deployment. No internet connection is required. No data leaves the vehicle.
Layer 3 — Probabilistic Sensor Fusion
VIO and VPR outputs are combined through a probabilistic sensor fusion architecture that maintains accurate localization even when VPR confidence is temporarily reduced, due to low visual texture, cloud cover, partial occlusion, or rapid illumination change.

What True North Can Do
GNSS-Denied Waypoint Navigation
TrueNorth enables fully autonomous transit from launch to target using pre-programmed coordinates, with no GNSS lock required at any point in the mission. The flight path is defined before takeoff and executed entirely onboard.
Zero RF Emission During Flight
True North operates in complete electronic silence. No radio link is maintained during autonomous transit. No signal is emitted that could be detected by RF monitoring equipment. The vehicle becomes electronically invisible from the moment it departs.
Fully Offline Operation
There is no cloud dependency, no uplink requirement, and no ground station involvement during flight. The only connectivity required is pre-mission map loading and optional post-flight data analysis. Once airborne, True North is entirely self-contained.
Why This Matters Now
The proliferation of GPS jamming and spoofing technology has fundamentally changed the risk calculus for drone operations. Equipment that once required state-level resources to deploy is now commercially available. The window in which GNSS-dependent drone operations can be considered reliable is closing.
True North represents a different architectural approach, one where the navigation stack is sovereign. It does not ask permission from a satellite. It does not expose itself through radio emissions. It does not require a connection to function. It simply navigates.
For defense operators, infrastructure inspectors, and mission planners working in environments where signal availability cannot be guaranteed, this is not a feature upgrade. It is a fundamental shift in what autonomous UAV operations can reliably accomplish.
Navigate anywhere. See everything. Depend on nothing.
TrueNorth is developed by Skyline Drones R&D Division. Technical documentation, integration guides, and NDA-gated specifications are available upon request.

GNSS-Independent Navigation




{kind=link}
{kind=link}
{kind=link}
{kind=link}