
Cuprumin 2024 – Revoluționarea cartografierii carierelor: Scanare LiDAR de ultimă generație la Roșia Poieni și iazul Geamăna
Proiectul a vizat scanarea și cartografierea detaliată a Carierei Roșia Poieni, a deversorului acesteia și a iazului de decantare Geamăna, utilizând o scanare LiDAR avansată pentru a obține date precise și de înaltă rezoluție pentru întreaga suprafață de 865 ha.
")
Image 1 – Areas of interest
Procesul s-a desfășurat în două etape, după cum urmează:
Etapa 1: Generarea DSM (Modelul Digital al Suprafeței)
În prima etapă, am generat un Model Digital al Suprafeței (DSM), care a servit drept bază pentru viitoarele zboruri cu senzori LiDAR. Scopul a fost menținerea unei altitudini constante față de sol, asigurând astfel o densitate uniformă a punctelor în norul de puncte rezultat, în special având în vedere diferențele de elevație de peste 600 m.
- Echipa 1 a fost responsabilă pentru scanarea carierei și a deversorului, utilizând simultan două drone DJI Mavic 3 Enterprise echipate cu camere de 20 MP. Planurile de zbor au fost create în aplicația DJI Pilot 2, folosind funcția de urmărire în timp real (terrain following), care permite menținerea unei distanțe constante față de sol prin senzorii optici integrați. Acest lucru a contribuit la obținerea unui DSM de înaltă calitate.
- Echipa 2, formată dintr-o singură persoană, a gestionat scanarea iazului de decantare Geamăna, utilizând o dronă DJI M350 RTK dchipată cu un senzor de 45 MP DJI Zenmuse P1. Planul de zbor a fost realizat tot prin aplicația DJI Pilot 2 afolosind funcția de import DSM prin satelit. Această metodă a permis menținerea unei distanțe constante față de sol, utilizând un DSM generat din imagini satelitare, suficient de precis pentru a servi ca bază pentru zborurile ulterioare de scanare LiDAR.
În prima fază, au fost capturate peste 6000 de imagini pe parcursul a 32 de zboruri într-o singură zi.
Etapa 2: Capturarea datelor LiDAR
După capturarea datelor brute pentru DSM, acestea au fost procesate în aceeași zi, utilizând o stație de lucru pentru a genera DSM-urile finale, care au format baza pentru capturarea datelor LiDAR.
Pentru planificarea zborurilor LiDAR a fost utilizat software-ul Universal Ground Control Software (UgCS).

DSM-urile generate anterior au fost importate în UgCS și au servit drept bază pentru toate planurile de zbor, fie pentru Cariera Roșia Poieni, deversor sau iazul de decantare Geamăna.

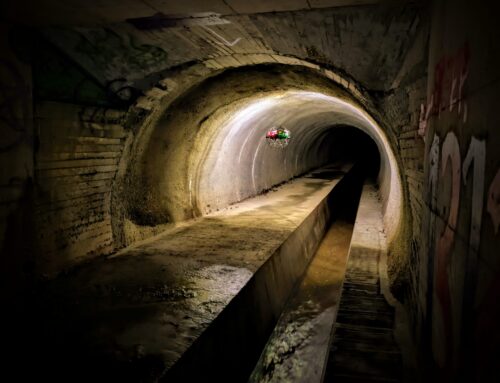
Image 2 – LiDAR flight mission based on previously generated DSM from the drone
The previously generated DSMs were imported into UgCS and served as the basis for all flight plans, either for the Roșia Poieni Quarry, the spillway, or the Geamăna tailings pond.

Colectarea datelor a fost realizată cu ajutorul sistemului YellowScan Surveyor Ultra care utilizează tehnologia LiDAR pentru a colecta date cu densitate mare de puncte, esențiale pentru cartografierea detaliată a zonelor mari. Cu un câmp vizual de 360°, acest sistem poate colecta 640.000 de puncte pe secundă într-un singur ecou și are capacitatea de a înregistra până la trei ecouri, fiind deosebit de eficient în zone dificile, cum ar fi cele împădurite. Această caracteristică asigură o acoperire completă și procesarea rapidă a datelor. Surveyor Ultra oferă o acuratețe de 3,0 cm și o precizie de 2,5 cm, fiind ideal pentru aplicații care necesită măsurători extrem de precise.

Senzorul LiDAR a fost montat pe drona profesională Hexadrone Tundra 2 cunoscută pentru robustețea și modularitatea sa, fiind concepută pentru cele mai solicitante misiuni. Drona poate transporta o sarcină utilă de până la 8 kg, ceea ce a permis un timp de zbor de până la 42 de minute în cadrul acestui proiect. Tundra 2 este echipată cu funcția de urmărire a terenului, esențială pentru menținerea unei altitudini constante folosind DSM-ul generat anterior. Proiectată să reziste la praf și apă (standard IP54), Tundra 2 oferă fiabilitate maximă, fiind utilizată inclusiv de forțele militare franceze.

Figure 3 – Colored point cloud, Quarry
În a doua etapă, au fost generați 649 GB de date pe parcursul a 17 zboruri, rezultând un nor de puncte (model digital) format din 3.541.723.963 (da, 3,5 miliarde) de puncte.




{kind=link}
{kind=link}
{kind=link}
{kind=link}